
Chapter 5 Hashing
5.1 General Idea
Generally a search is performed on some part (that is, data field) of the item. This is called the key. We will refer to the table size as TableSize, with the understanding that this is part of a hash data structure and not merely some variable floating around globally. The common convention is to have the table run from 0 to TableSize - 1.
Each key is mapped into some number in the range 0 to TableSize - 1 and placed in the appropriate cell. The mapping is called a hash function, which ideally should be simple to compute and should ensure that any two distinct keys get different cells. Since there are a finite number of cells and a virtually inexhaustible supply of keys, this is clearly impossible, and thus we seek a hash function that distributes the keys evenly among the cells.
This is the basic idea of hashing. The only remaining problems deal with choosing a function, deciding what to do when two keys hash to the same value (this is known as a collision), and deciding on the table size.
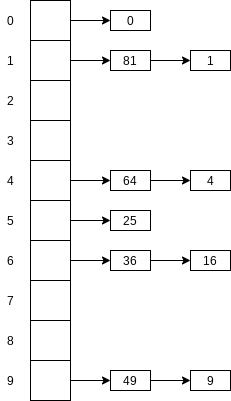
5.3 Separate Chaining
Separate chaining is to keep a list of all elements that hash to the same value.
We define the load factor,
5.4 Hash Tables Without Linked Lists
Generally, the load factor should be below
5.4.1 Linear Probing
In linear probing,
As long as the table is big enough, a free cell can always be found, but the time to do so can get quite large. Worse, even if the table is relatively empty, blocks of occupied cells start forming. This effect, known as primary clustering, means that any key that hashes into the cluster will require several attempts to resolve the collision, and then it will add to the cluster.
It can be shown that the expected number of probes using linear probing is roughly
The corresponding formulas, if clustering is not a problem, are fairly easy to derive. We will assume a very large table and that each probe is independent of the previous probes. These assumptions are satisfied by a random collision resolution strategy and are reasonable unless
The caveat is that
These formulas are clearly better than the corresponding formulas for linear probing. Clustering is not only a theoretical problem but actually occurs in real implementations.
If
5.4.2 Quadratic Probing
Quadratic probing is a collision resolution method that eliminates the primary clustering problem of linear probing. Quadratic probing is what you would expect – the collision function is quadratic. The popular choice is
For linear probing it is a bad idea to let the hash table get nearly full, because performance degrades. For quadratic probing, the situation is even more drastic: There is no guarantee of finding an empty cell once the table gets more than half full, or even before the table gets half full if the table size is not prime. This is because at most half of the table can be used as alternative locations to resolve collisions.
Theorem 5.1.
If quadratic probing is used, and the table size is prime, then a new element can always be inserted if the table is at least half empty.
Proof.
Let the table size, TableSize, be an (odd) prime greater than TableSize) and TableSize), where
Since TableSize is prime, it follows that either TableSize). Since TableSize / 2 alternative locations are distinct. If at most TableSize / 2 positions are taken, then an empty spot can always be found.
If the table is even one more than half full, the insertion could fail (although this is extremely unlikely). Therefore, it is important to keep this in mind. It is also crucial that the table size be prime.
public class QuadraticProbingHashTable<AnyType> {
private static final int DEFAULT_TABLE_SIZE = 11;
private HashEntry<AnyType>[] array;
private int currentSize;
public QuadraticProbingHashTable() {
this(DEFAULT_TABLE_SIZE);
}
public QuadraticProbingHashTable(int size) {
allocateArray(size);
makeEmpty();
}
private static class HashEntry<AnyType> {
public AnyType element;
public boolean isActive;
public HashEntry(AnyType e) {
this(e.true);
}
public HashEntry(AnyType e, boolean i) {
element = e;
isActive = i;
}
}
public void makeEmpty() {
currentSize = 0;
for (int i = 0; i < array.length; i++)
array[i] = null;
}
private void allocateArray(int arraySize) {
array = new HashEntry[nextPrime(arraySize)];
}
public boolean contains(AnyType x) {
int currentPos = findPos(x);
return isActive(currentPos);
}
private int findPos(AnyType x) {
int offset = 1;
int currentPos = myhash(x);
while (array[currentPos] != null && !array[currentPos].element.equals(x)) {
currentPos += offset;
offset += 2;
if (currentPos >= array.length)
currentPos -= array.length;
}
return currentPos;
}
private boolean isActive(int currentPos) {
return array[currentPos] != null && array[currentPos].isActive;
}
public void insert(AnyType x) {
int currentPos = findPos(x);
if (isActive(currentPos))
return ;
array[currentPos] = new HashEntry<>(x, true);
if (++currentSize > array.length / 2)
rehash();
}
public void remove(AnyType x) {
int currentPos = findPos(x);
if (isActive(currentPos))
array[currentPos].isActive = false;
}
}Standard deletion cannot be performed in a probing hash table, because the cell might have caused a collision to go past it.
Although quadratic probing eliminates primary clustering, elements that hash to the same position will probe the same alternative cells. This is known as secondary clustering. Secondary clustering is a slight theoretical blemish. Simulation results suggest that it generally causes less than an extra half probe per search.
5.4.3 Double Hashing
For double hashing, one popular choice is
5.5 Rehashing
Rehashing is to build another table that is about twice as big (with an associated new hash function) and scan down the entire original hash table, computing the new hash value for each (nondeleted) element and inserting it in the new table.
5.6 Hash Tables in the Standard Library
In Java, library types that can be reasonably inserted into a HashSet or as keys into a HashMap already have equals and hashCode defined. In particular the String class has a hashCode. Because the expensive part of the hash table operations is computing the hashCode, the hashCode method in the String class contains an important optimization: Each String object stores internally the value of its hashCode. Initially it is hashCode is invoked, the value is remembered. Thus if hashCode is computed on the same String object a second time, we can avoid the expensive recomputation. This technique is called caching the hash code, and represents another classic time-space tradeoff.
public final class String {
private int hash = 0;
public int hashCode() {
if(hash != 0)
return hash;
for(int i = 0; i < length(); i++)
hash = hash * 31 + (int) charAt( i );
return hash;
}
}Caching the hash code works only because Strings are immutable: If the String were allowed to change, it would invalidate the hashCode, and the hashCode would have to be reset back to
5.7 Hash Tables with Worst-Case O(1) Access
For separate chaining, assuming a load factor of
5.7.1 Perfect Hashing
Suppose, for purposes of simplification, that all
Theorem 5.2.
If
Proof.
If a pair
Of course, using
As with the original idea, each secondary hash table will be constructed using a different hash function until it is collision free. The primary hash table can also be constructed several times if the number of collisions that are produced is higher than required. This scheme is known as perfect hashing. All that remains to be shown is that the total size of the secondary hash tables is indeed expected to be linear.
Theorem 5.3.
If
Proof.
Using the same logic as in the proof of Theorem 5.2, the expected number of pairwise collisions is at most
Thus the probability that the total secondary space requirement is more than
Perfect hashing works if the items are all known in advance. There are dynamic schemes that allow insertions and deletions (dynamic perfect hashing).
5.7.2 Cuckoo Hashing
In cuckoo hashing, suppose we have
The cuckoo hashing algorithm itself is simple: To insert a new item x, first make sure it is not already there. We can then use the first hash function and if the (first) table location is empty, the item can be placed.

If the table’s load factor is below
We cannot successfully insert
However, if the table’s load factor is at
Cuckoo Hash Table Implementation
public interface HashFamily<AnyType> {
int hash(AnyType x, int which);
int getNumberOfFunctions();
void generateNewFunctions();
}
public class StringHashFamily implements HashFamily<String> {
private final int[] MULTIPLIERS;
private final java.util.Random r = new java.util.Random();
public StringHashFamily(int d) {
MULTIPLIERS = new int[d];
generateNewFunctions();
}
public int getNumberOfFunctions() {
return MULTIPLIERS.length;
}
public void generateNewFunctions() {
for(int i = 0; i < MULTIPLIERS.length; i++)
MULTIPLIERS[i] = r.nextInt();
}
public int hash(String x, int which) {
final int multiplier = MULTIPLIERS[which];
int hashVal = 0;
for(int i = 0; i < x.length(); i++)
hashVal = multiplier * hashVal + x.charAt(i);
return hashVal;
}
}
public class CuckooHashTable<AnyType> {
private static final double MAX_LOAD = 0.4;
private static final int ALLOWED_REHASHES = 1;
private static final int DEFAULT_TABLE_SIZE = 101;
private final HashFamily<? super AnyType> hashFunctions;
private final int numHashFunctions;
private AnyType[] array;
private int currentSize;
private int rehashes = 0;
private Random r = new Random();
public CuckooHashTable(HashFamily<? super AnyType> hf) {
this(hf, DEFAULT_TABLE_SIZE);
}
public CuckooHashTable(HashFamily<? super AnyType> hf, int size) {
allocateArray(nextPrime(size));
doClear( );
hashFunctions = hf;
numHashFunctions = hf.getNumberOfFunctions();
}
private void allocateArray(int arraySize) {
array = (AnyType[])new Object[arraySize];
}
private void doClear() {
currentSize = 0;
for(int i = 0; i < array.length; i++)
array[ i ] = null;
}
private int myhash(AnyType x, int which) {
int hashVal = hashFunctions.hash(x, which);
hashVal %= array.length;
if(hashVal < 0)
hashVal += array.length;
return hashVal;
}
private int findPos(AnyType x) {
for(int i = 0; i < numHashFunctions; i++) {
int pos = myhash(x, i);
if(array[ pos ] != null && array[pos].equals(x))
return pos;
}
return -1;
}
public boolean contains(AnyType x) {
return findPos(x) != -1;
}
public boolean remove(AnyType x) {
int pos = findPos(x);
if(pos != -1) {
array[pos] = null;
currentSize--;
}
return pos != -1;
}
public boolean insert(AnyType x) {
if(contains(x))
return false;
if(currentSize >= array.length * MAX_LOAD)
expand();
return insertHelper1(x);
}
private boolean insertHelper1(AnyType x) {
final int COUNT_LIMIT = 100;
while(true)
{
int lastPos = -1;
int pos;
for(int count = 0; count < COUNT_LIMIT; count++) {
for(int i = 0; i < numHashFunctions; i++) {
pos = myhash(x, i);
if(array[pos] == null) {
array[pos] = x;
currentSize++;
return true;
}
}
int i = 0;
do {
pos = myhash(x, r.nextInt(numHashFunctions));
} while( pos == lastPos && i++ < 5 );
AnyType tmp = array[lastPos = pos];
array[pos] = x;
x = tmp;
}
if(++rehashes > ALLOWED_REHASHES) {
expand();
rehashes = 0;
} else
rehash();
}
}
private void expand() {
rehash((int)(array.length / MAX_LOAD));
}
private void rehash() {
hashFunctions.generateNewFunctions();
rehash(array.length);
}
private void rehash(int newLength) {
AnyType[] oldArray = array;
allocateArray(nextPrime(newLength));
currentSize = 0;
for(AnyType str: oldArray)
if(str != null)
insert(str);
}
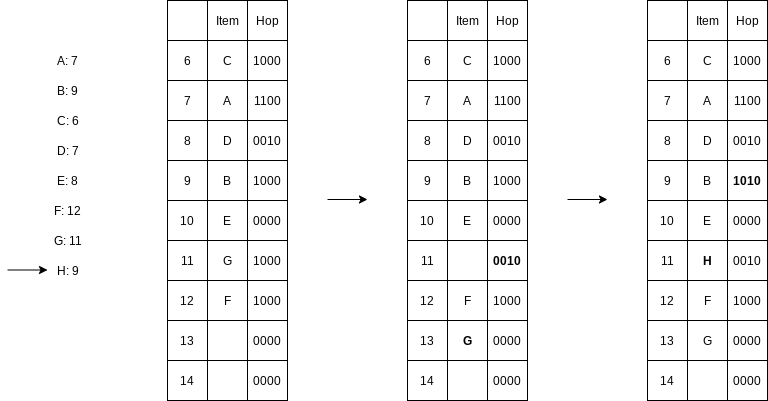
}5.7.3 Hopscotch Hashing
Hopscotch hashing is a new algorithm that tries to improve on the classic linear probing algorithm.
The idea of hopscotch hashing is to bound the maximal length of the probe sequence by a predetermined constant that is optimized to the underlying computer’s architecture. Doing so would give constant-time lookups in the worst case, and like cuckoo hashing, the lookup could be parallelized to simultaneously check the bounded set of possible locations.
If an insertion would place a new item too far from its hash location, then we efficiently go backward toward the hash location, evicting potential items. If we are careful, the evictions can be done quickly and guarantee that those evicted are not placed too far from their hash locations. The algorithm is deterministic in that given a hash function, either the items can be evicted or they can’t. The latter case implies that the table is likely too crowded, and a rehash is in order; but this would happen only at extremely high load factors, exceeding 0.9. For a table with a load factor of
Here shows a fairly crowded hopscotch hash table, using MAX_DIST = 4. The bit array for position Hop[6] is set. Hop[7] has the first two bits set, indicating that positions
5.8 Universal Hashing
Although hash tables are very efficient and have average cost per operation, assuming appropriate load factors, their analysis and performance depend on the hash function having two fundamental properties:
- The hash function must be computable in constant time.
- The hash function must distribute its items uniformly among the array slots.
Universal hash functions, which allow us to choose the hash function randomly in such a way that condition 2 above is satisfied.
We use TableSize.
Definition 5.1.
A family h in
Definition 5.2.
A family h in
To design a simple universal hash function, we will assume first that we are mapping very large integers into smaller integers ranging from
Theorem 5.4.
The hash family
Proof.
Let
Clearly if
So let
Finally, this means that the probability that
For a given
5.9 Extendible Hashing
Extendible hashing, allows a search to be performed in two disk accesses. Insertions also require few disk accesses.
The expected number of leaves is
The more surprising result is that the expected size of the directory is